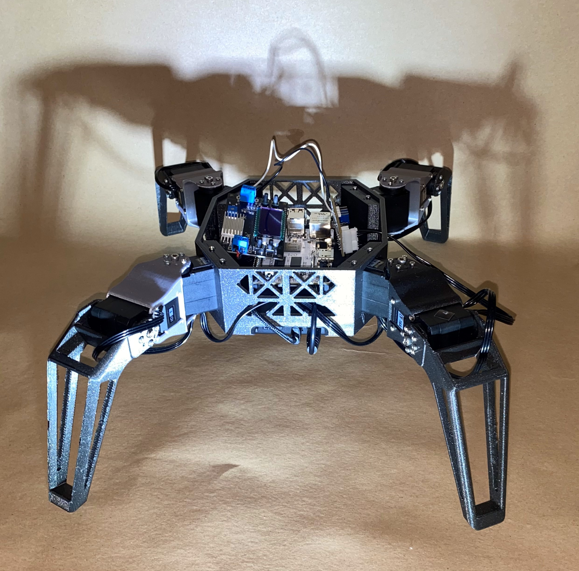
Quadrupedal Walking Robot
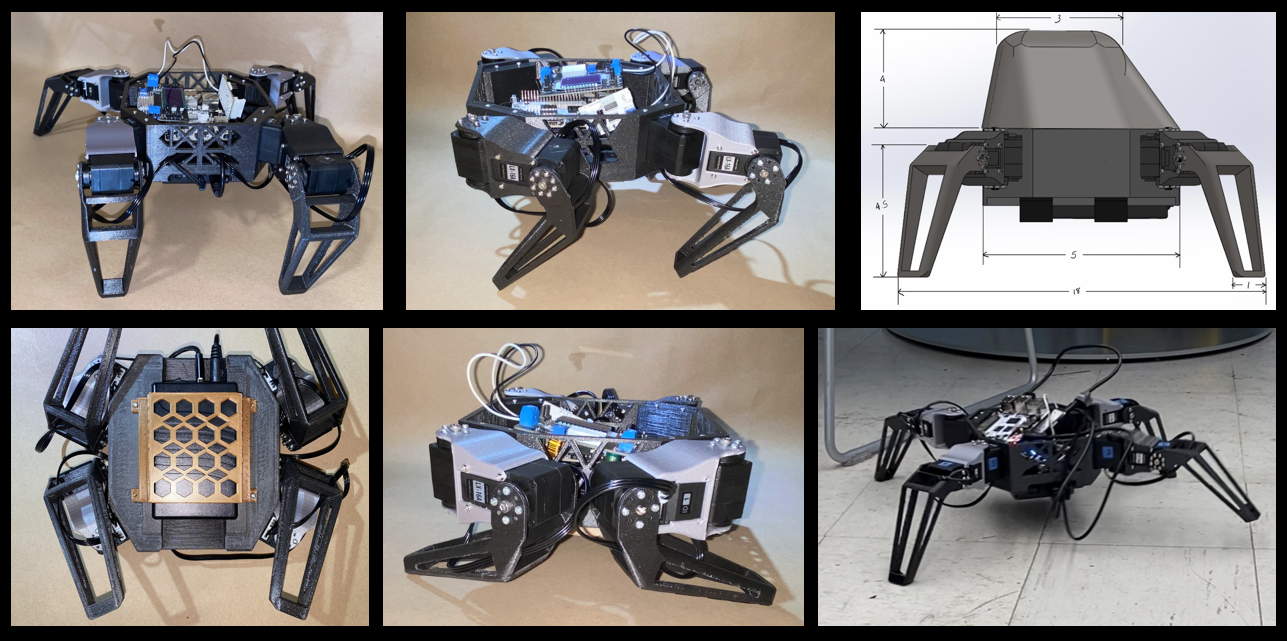
Eagle was my final project for a robotics studio course I took my Sophomore year. The 6DOF robot has four legs and is controlled by a Raspberry Pi. All major components were 3D printed from PLA. The robot was constrained to move under the power of only 8 servos.
I studied inverse kinematics to place the servos in the most optimal positions, wrote the kinematic code in Python, and established a WiFi connection with the robot as I continued to improve the gait.
I cannot say this robot is my proudest work (I was a novice designer and programmer), but I learned a whole lot about robotic locomotion and controls.